广度优先搜索(BFS,Breadth-First Search)
在战棋类游戏中(如高级战争),地图一般会被划分为网格,可移动单位一般都有一个移动步数范围,在玩家操控时会在地图上显示可移动范围,如下图中的红色坦克。要实现这一功能就可使用BFS算法了。

基本概念
算法从起始节点出发,首先访问与起始节点距离为 1 的所有节点,然后访问距离为 2 的所有节点,依此类推。在 BFS 中,所有边的权重相同,因此每次移动到相邻节点的代价相等(无权图)。
算法步骤
BFS 使用队列(Queue)数据结构来实现。
- 初始化:
- 将起始节点标记为已访问,并将其加入队列。
- 创建一个记录节点是否被访问的布尔数组或集合。
- 开始遍历:
- 从队列中取出一个节点,访问该节点。
- 将该节点的所有未访问过的邻接节点标记为已访问,并依次加入队列。
- 继续遍历:
- 重复上述步骤,直到队列为空或找到目标节点。
算法实现
以下是 BFS 算法的伪代码和 Python 实现:
伪代码
1
2
3
4
5
6
7
8
9
10
11
12
BFS(graph, start):
create a queue Q
create a set of visited nodes
enqueue start to Q
add start to visited
while Q is not empty:
node = dequeue from Q
for each neighbor in graph.neighbors(node):
if neighbor is not in visited:
enqueue neighbor to Q
add neighbor to visited
Python 实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
from collections import deque
def bfs(graph, start):
# 初始化队列和已访问集合
queue = deque([start])
visited = set([start])
while queue:
node = queue.popleft()
print(node) # 访问节点
for neighbor in graph[node]:
if neighbor not in visited:
visited.add(neighbor)
queue.append(neighbor)
示例
假设有一个简单的无权图如下:
1
2
3
A - B - C
| |
D - E
调用bfs(graph, 'A'),遍历顺序为:A -> B -> D -> C -> E。
总结
BFS 是一种简单的图遍历算法,特别适用于无权图的最短路径查找和层级遍历。但是在寻路算法中,其无目的性使其多了很多不必要的计算。
Best First Search
基于广度优先搜索,引入了启发式搜索。
在 Best First Search 中,不会对所有的相邻路径进行搜索,而是基于一个优先度来搜索。此优先度一般使用曼哈顿距离来计算。
即给定目标点,待搜索路径点会计算一个和目标点的曼哈顿距离,距离越短优先度越高。
相比较广度优先搜索,有目的性搜索减少了很多不必要的计算。
但是 Best First Search 找出的路径不一定是最优解。
A*
A*(A-star)算法是一种用于图搜索的启发式算法,广泛应用于路径寻找和图遍历。它结合了 Dijkstra 算法的最短路径搜索和启发式方法的预判能力,既能确保找到最优路径,又在大多数情况下高效运行。
1. 基本概念
- 启发式搜索:使用启发式函数估计当前节点到目标节点的代价,从而指导搜索方向。
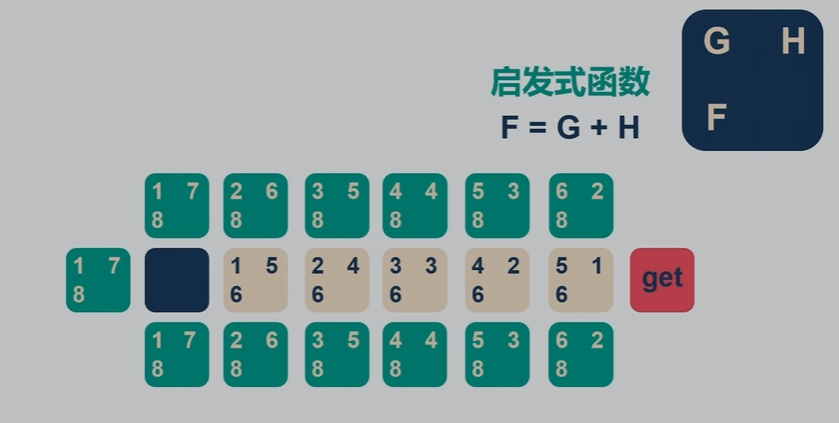
- 评估函数:A*算法使用评估函数
(f(n) = g(n) + h(n)),其中:- (g(n)):从起点到当前节点 n 的实际代价。有时可以通过 g(n-1)计算得来。
- (h(n)):从当前节点 n 到目标节点的估计代价(启发式函数)。
2. 算法步骤
A*算法使用优先队列(Priority Queue)来实现,其步骤如下:
- 初始化:
- 将起始节点放入开放列表(Open List),初始的(g(n) = 0)。
- 关闭列表(Closed List)用于存储已访问节点。
- 迭代过程:
- 从开放列表中取出具有最低(f(n))值的节点作为当前节点。
- 如果当前节点是目标节点,则结束搜索,构建路径。
- 否则,将当前节点移至关闭列表。
- 对当前节点的每个相邻节点:
- 如果相邻节点在关闭列表中,则忽略。
- 计算相邻节点的(g)值,如果该节点不在开放列表中或新的(g)值更小,则更新相邻节点的(g)和(f)值,并将其父节点设置为当前节点。
- 如果相邻节点不在开放列表中,则将其添加进去。
3. 算法实现
以下是 A*算法的伪代码和 Python 实现:
伪代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
A*(start, goal):
openList = priority queue containing start
closedList = empty set
g(start) = 0
f(start) = g(start) + h(start)
while openList is not empty:
current = node in openList with lowest f(node)
if current is goal:
return reconstruct_path(goal)
remove current from openList
add current to closedList
for each neighbor of current:
if neighbor in closedList:
continue
tentative_g = g(current) + d(current, neighbor)
if neighbor not in openList:
add neighbor to openList
elif tentative_g >= g(neighbor):
continue
set parent of neighbor to current
g(neighbor) = tentative_g
f(neighbor) = g(neighbor) + h(neighbor)
return failure
Python 实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
import heapq
def a_star(graph, start, goal, h):
open_list = []
heapq.heappush(open_list, (0, start))
came_from = {}
g_score = {start: 0}
f_score = {start: h(start)}
while open_list:
_, current = heapq.heappop(open_list)
if current == goal:
return reconstruct_path(came_from, start, goal)
for neighbor, cost in graph[current]:
tentative_g_score = g_score[current] + cost
if neighbor not in g_score or tentative_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + h(neighbor)
heapq.heappush(open_list, (f_score[neighbor], neighbor))
return None
def reconstruct_path(came_from, start, goal):
path = [goal]
while path[-1] != start:
path.append(came_from[path[-1]])
path.reverse()
return path
4. 启发式函数
启发式函数 (h(n)) 是 A*算法的关键,其选择会影响算法的效率和正确性。常用的启发式函数有:
- 曼哈顿距离:适用于网格图,每次移动的代价相等。
- 欧几里得距离:适用于实际距离作为代价的图。
- 切比雪夫距离:适用于允许对角移动的网格图。
5. 应用场景
A*算法广泛应用于需要路径规划的领域,包括:
- 游戏开发:NPC 路径规划、迷宫求解。
- 机器人导航:移动机器人路径规划。
- 地图服务:GPS 导航、地图应用中的路线规划。
总结
A*算法是一个功能强大且灵活的路径寻找算法,通过结合实际代价和启发式估计,可以高效地找到从起点到目标点的最优路径。在实际应用中,选择合适的启发式函数是确保算法效率和准确性的关键。
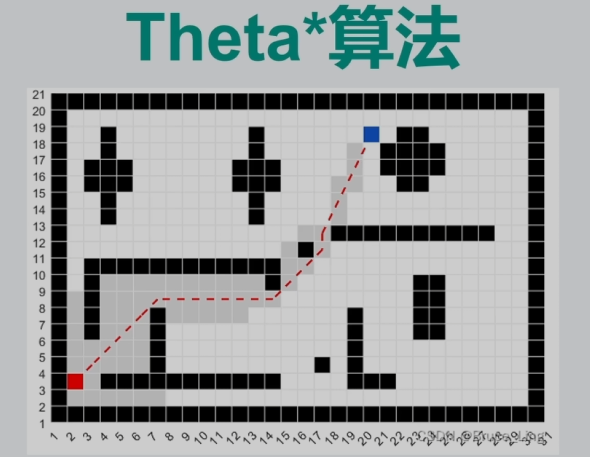
Theta*
Theta*算法是 A*算法的扩展版本,它在路径规划中提供了一种改进(加入了射线探测),能够生成更短、更自然的路径,特别是对于网格图。Theta*算法的主要特点是允许对角线和直线穿越多个网格单元,而不仅仅是移动到相邻的单元,从而避免了 A*中常见的“锯齿状”路径。此时一般使用欧式距离。
1. 基本概念
- 线性插值:Theta*通过线性插值判断两点之间的直线是否可行,从而减少路径中的拐点。
- 亲节点(Parent Node):每个节点不仅记录从哪个节点访问到它,还记录访问该节点时的起始节点,这样可以跳过中间节点进行直接连接。
2. 算法步骤
Theta*算法在 A*算法的基础上进行修改,其步骤如下:
- 初始化:
- 将起始节点放入开放列表(Open List),并将其父节点设为自身。
- 创建记录各节点的父节点(Parent)和(g)值的数组。
- 迭代过程:
- 从开放列表中取出具有最低(f(n))值的节点作为当前节点。
- 如果当前节点是目标节点,则结束搜索,构建路径。
- 否则,将当前节点移至关闭列表。
- 对当前节点的每个相邻节点:
- 如果相邻节点在关闭列表中,则忽略。
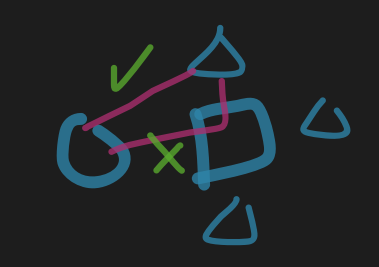
- 计算从当前节点的父节点直接到相邻节点的代价(即直线距离),如果比从当前节点再到相邻节点的代价小,则更新相邻节点的父节点为当前节点的父节点,否则更新为当前节点。(和 A*算法的主要区别,如下图所示,🟦 为当前节点,🔵 为父节点,🔺 为相邻节点。可以看到上下两个相邻节点可以直接和父节点相连($cost = \sqrt{2}$),而无需经由当前节点($cost=2$))
- 更新相邻节点的(g)值和(f)值,如果相邻节点不在开放列表中,则将其添加进去。
3. 算法实现
以下是 Theta*算法的伪代码和 Python 实现:
伪代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
Theta*(start, goal):
openList = priority queue containing start
closedList = empty set
parent[start] = start
g(start) = 0
f(start) = g(start) + h(start)
while openList is not empty:
current = node in openList with lowest f(node)
if current is goal:
return reconstruct_path(parent, start, goal)
remove current from openList
add current to closedList
for each neighbor of current:
if neighbor in closedList:
continue
if line_of_sight(parent[current], neighbor):
tentative_g = g(parent[current]) + distance(parent[current], neighbor)
if tentative_g < g(neighbor):
parent[neighbor] = parent[current]
g(neighbor) = tentative_g
f(neighbor) = g(neighbor) + h(neighbor)
if neighbor not in openList:
add neighbor to openList
else:
tentative_g = g(current) + distance(current, neighbor)
if tentative_g < g(neighbor):
parent[neighbor] = current
g(neighbor) = tentative_g
f(neighbor) = g(neighbor) + h(neighbor)
if neighbor not in openList:
add neighbor to openList
return failure
Python 实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
import heapq
import math
def line_of_sight(grid, start, end):
# 实现线性插值检查两点之间的直线是否可通
x0, y0 = start
x1, y1 = end
dx, dy = x1 - x0, y1 - y0
steps = max(abs(dx), abs(dy))
for i in range(steps + 1):
x = int(x0 + i * dx / steps)
y = int(y0 + i * dy / steps)
if grid[y][x] == 1: # 假设1代表障碍物
return False
return True
def theta_star(grid, start, goal, h):
open_list = []
heapq.heappush(open_list, (0, start))
parent = {start: start}
g_score = {start: 0}
f_score = {start: h(start)}
while open_list:
_, current = heapq.heappop(open_list)
if current == goal:
return reconstruct_path(parent, start, goal)
for neighbor in get_neighbors(grid, current):
if line_of_sight(grid, parent[current], neighbor):
tentative_g_score = g_score[parent[current]] + distance(parent[current], neighbor)
if neighbor not in g_score or tentative_g_score < g_score[neighbor]:
parent[neighbor] = parent[current]
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + h(neighbor)
heapq.heappush(open_list, (f_score[neighbor], neighbor))
else:
tentative_g_score = g_score[current] + distance(current, neighbor)
if neighbor not in g_score or tentative_g_score < g_score[neighbor]:
parent[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + h(neighbor)
heapq.heappush(open_list, (f_score[neighbor], neighbor))
return None
def distance(point1, point2):
return math.hypot(point2[0] - point1[0], point2[1] - point1[1])
def reconstruct_path(parent, start, goal):
path = [goal]
while path[-1] != start:
path.append(parent[path[-1]])
path.reverse()
return path
def get_neighbors(grid, node):
neighbors = []
x, y = node
for dx in [-1, 0, 1]:
for dy in [-1, 0, 1]:
if dx == 0 and dy == 0:
continue
nx, ny = x + dx, y + dy
if 0 <= nx < len(grid[0]) and 0 <= ny < len(grid):
neighbors.append((nx, ny))
return neighbors
4. 应用场景
Theta*算法适用于需要生成更直、更自然路径的场景,如:
- 机器人导航:移动机器人路径规划,减少转弯,提高路径效率。
- 游戏开发:生成自然的 NPC 路径,避免锯齿状路径。
- 地图服务:复杂地形中的路径规划,如无人机导航。
总结
Theta*算法通过允许节点之间的直接连接,提高了路径的平滑性和自然性。它在实际应用中特别适用于需要生成直线路径或减少转弯的场景,如机器人导航和游戏开发。在这些领域,Theta*提供了一种更优的路径规划方案。
跳点搜索算法
跳点搜索(Jump Point Search,JPS)是一种优化的路径搜索算法,专门设计用于加速 A算法在网格图上的运行。JPS 通过跳过冗余节点,减少了 A算法的搜索空间,从而提高了效率。
1. 基本概念
- 跳点(Jump Point):是路径上的关键点,这些点决定了路径的转折点或方向改变点。
- 强制邻居(Forced Neighbor):在搜索过程中必须考虑的邻居节点,以确保不会遗漏潜在的最短路径。(在碰撞体四周)
2. 算法步骤
JPS 通过以下步骤进行优化:
- 初始化:
- 与 A*算法类似,初始化起始节点的开放列表、关闭列表以及相应的代价值。
- 跳跃过程:
- 从当前节点沿一个方向“跳跃”,直到遇到以下情况之一:
- 到达目标节点。
- 遇到障碍物。
- 找到一个跳点(转折点或强制邻居)。
- 从当前节点沿一个方向“跳跃”,直到遇到以下情况之一:
- 跳点的确定:
- 使用启发式方法判断当前方向上的强制邻居,确定跳点。
- 强制邻居是在当前方向上必须检查的节点,确保路径不会遗漏。
- 路径记录:
- 记录路径上的跳点,并将这些跳点加入开放列表。
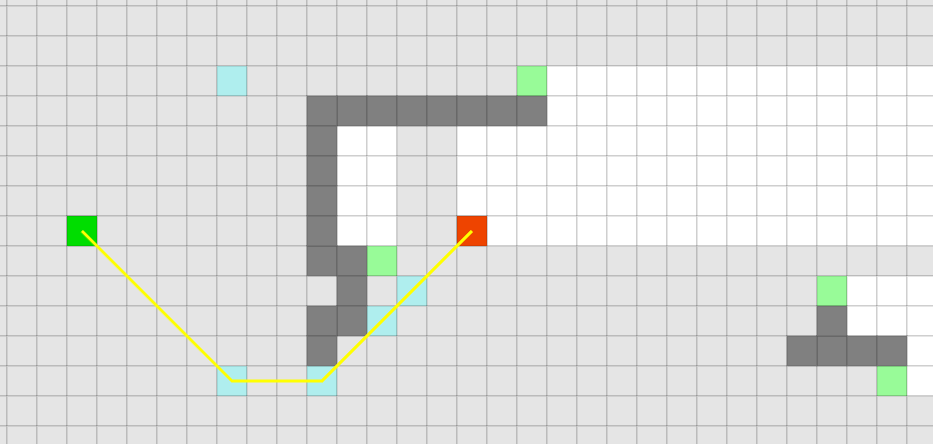
如下图:蓝色和绿色点为跳点,蓝色为已访问的跳点
3. 算法实现
以下是 JPS 算法的伪代码和 Python 实现:
伪代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
JPS(start, goal):
openList = priority queue containing start
closedList = empty set
g(start) = 0
f(start) = g(start) + h(start)
while openList is not empty:
current = node in openList with lowest f(node)
if current is goal:
return reconstruct_path(current)
remove current from openList
add current to closedList
for each direction in possible_directions:
neighbor = jump(current, direction, goal)
if neighbor is not None:
if neighbor in closedList:
continue
tentative_g = g(current) + distance(current, neighbor)
if neighbor not in openList or tentative_g < g(neighbor):
parent[neighbor] = current
g(neighbor) = tentative_g
f(neighbor) = g(neighbor) + h(neighbor)
if neighbor not in openList:
add neighbor to openList
return failure
jump(current, direction, goal):
next = current + direction
if next is blocked or out of bounds:
return None
if next == goal:
return next
if has_forced_neighbors(next, direction):
return next
return jump(next, direction, goal)
Python 实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
import heapq
import math
def jps(grid, start, goal, h):
open_list = []
heapq.heappush(open_list, (0, start))
g_score = {start: 0}
parent = {start: None}
while open_list:
_, current = heapq.heappop(open_list)
if current == goal:
return reconstruct_path(parent, start, goal)
for direction in get_directions():
neighbor = jump(grid, current, direction, goal, parent, g_score)
if neighbor:
tentative_g = g_score[current] + distance(current, neighbor)
if neighbor not in g_score or tentative_g < g_score[neighbor]:
g_score[neighbor] = tentative_g
f_score = tentative_g + h(neighbor)
heapq.heappush(open_list, (f_score, neighbor))
parent[neighbor] = current
return None
def jump(grid, current, direction, goal, parent, g_score):
x, y = current
dx, dy = direction
next_node = (x + dx, y + dy)
# 障碍物或者边界
if not in_bounds(grid, next_node) or grid[next_node[1]][next_node[0]] == 1:
return None
# 终点
if next_node == goal:
return next_node
# 是否有强制邻居
if has_forced_neighbors(grid, next_node, direction):
return next_node
# 斜方向
if dx != 0 and dy != 0:
# 分解成水平和垂直分量搜索
# 如果这两个搜索方向上有终点或者强制邻居,则返回这一节点
# 表示此节点是一个跳点
if jump(grid, next_node, (dx, 0), goal, parent, g_score) or jump(grid, next_node, (0, dy), goal, parent, g_score):
return next_node
# 继续沿着方向搜索
return jump(grid, next_node, direction, goal, parent, g_score)
def get_directions():
return [(-1, 0), (1, 0), (0, -1), (0, 1), (-1, -1), (-1, 1), (1, -1), (1, 1)]
def distance(node1, node2):
return math.hypot(node2[0] - node1[0], node2[1] - node1[1])
def reconstruct_path(parent, start, goal):
path = [goal]
while path[-1] != start:
path.append(parent[path[-1]])
path.reverse()
return path
def in_bounds(grid, node):
x, y = node
return 0 <= x < len(grid[0]) and 0 <= y < len(grid)
def has_forced_neighbors(grid, node, direction):
x, y = node
dx, dy = direction
neighbors = [
(x - dy, y + dx), (x + dy, y - dx), # Orthogonal to direction
(x - dx, y + dy), (x + dx, y - dy) # Diagonal to direction
]
for nx, ny in neighbors:
if in_bounds(grid, (nx, ny)) and grid[ny][nx] == 0:
return True
return False
主流程分析:
这段代码实现了跳点搜索(Jump Point Search, JPS)算法中的主循环逻辑,结合 A*算法的启发式搜索来找到从起点到终点的最优路径。下面是逐行解析:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
while open_list:
_, current = heapq.heappop(open_list)
if current == goal:
return reconstruct_path(parent, start, goal)
for direction in get_directions():
neighbor = jump(grid, current, direction, goal, parent, g_score)
if neighbor:
tentative_g = g_score[current] + distance(current, neighbor)
if neighbor not in g_score or tentative_g < g_score[neighbor]:
g_score[neighbor] = tentative_g
f_score = tentative_g + h(neighbor)
heapq.heappush(open_list, (f_score, neighbor))
parent[neighbor] = current
详细解释
- 主循环:
1
while open_list:
- 当
open_list(优先队列)不为空时,持续执行循环。open_list保存待探索的节点。
- 当
- 从优先队列中取出当前节点:
1
_, current = heapq.heappop(open_list)
- 使用
heapq.heappop从优先队列open_list中取出优先级最高的节点,即具有最低f_score的节点,存入current。_存储的是f_score,但这里并不需要使用它。
- 使用
- 检查是否到达目标节点:
1 2
if current == goal: return reconstruct_path(parent, start, goal)
- 如果当前节点是目标节点,调用
reconstruct_path函数重建路径,并返回结果。
- 如果当前节点是目标节点,调用
- 获取所有可能的移动方向:
1
for direction in get_directions():
- 获取所有可能的移动方向(例如,上、下、左、右或对角线)。
- 跳点搜索:
1
neighbor = jump(grid, current, direction, goal, parent, g_score)
- 调用
jump函数从当前节点沿指定方向进行跳跃,寻找下一个跳点。返回的neighbor是找到的下一个跳点或None。
- 调用
- 处理找到的邻居节点:
1 2 3 4 5 6 7
if neighbor: tentative_g = g_score[current] + distance(current, neighbor) if neighbor not in g_score or tentative_g < g_score[neighbor]: g_score[neighbor] = tentative_g f_score = tentative_g + h(neighbor) heapq.heappush(open_list, (f_score, neighbor)) parent[neighbor] = current
- 如果找到有效的邻居节点:
- 计算从起点到该邻居节点的临时距离(
tentative_g)。 - 如果该邻居节点未被探索过,或找到了一条更短的路径到该邻居节点:
- 更新邻居节点的
g_score。 - 计算邻居节点的
f_score(f_score = g_score + h_score),其中h(neighbor)是从邻居节点到目标节点的启发式估计距离。 - 将邻居节点及其
f_score加入优先队列open_list。 - 记录邻居节点的父节点为当前节点。
- 更新邻居节点的
- 计算从起点到该邻居节点的临时距离(
- 如果找到有效的邻居节点:
主要函数和数据结构
open_list: 优先队列,存储待探索的节点及其f_score。heapq.heappop: 从优先队列中取出具有最低f_score的节点。goal: 目标节点。reconstruct_path: 重建从起点到目标节点的路径。get_directions: 获取所有可能的移动方向。jump: 执行跳点搜索,从当前节点沿指定方向跳跃,找到下一个跳点。g_score: 字典,存储从起点到各节点的实际距离。distance: 计算两个节点之间的实际距离。h: 启发函数,估计从某节点到目标节点的距离。heapq.heappush: 将节点及其f_score加入优先队列open_list。parent: 字典,存储每个节点的父节点,用于路径重建。
4. 关键点解释
- 跳点:跳点是路径上的关键点,跳过了中间的冗余节点。
- 强制邻居:在判断跳点时,必须检查的邻居节点,以确保不会遗漏最短路径。
- 线性搜索:从当前节点沿一个方向进行线性搜索,直到找到跳点或遇到障碍。
5. 应用场景
JPS 特别适合用于以下场景:
- 游戏开发:在大规模网格地图中,快速生成最优路径。
- 机器人导航:在网格化环境中,规划高效路径。
- 地图服务:优化大规模网格地图上的路径查询。
6. 时间复杂度和空间复杂度
- 时间复杂度:在理想情况下,JPS 显著减少了节点的扩展数量,因此比 A更快,尤其在空旷区域。然而,最坏情况下,时间复杂度仍与 A相同,为 O(b^d),其中 b 是分支因子,d 是路径深度。
- 空间复杂度:与 A*类似,为 O(b^d),因为需要存储开放列表和关闭列表中的节点。
总结
跳点搜索通过跳过冗余节点,优化了 A*算法在网格图上的运行。它能够显著减少搜索空间,从而提高路径规划的效率,适用于需要高效路径搜索的各种应用场景。
注:以上部分内容通过 ChatGpt 生成